|
Current Time:
|
|
|
|
|
Gerry's Electronics & Robotics Laboratory -=SOLDERING=- -=MY BENCH=- -=MY ROBOTS=- -=PCB FAB=- -=CHIPPERY=- |
|
-= WELCOME TO GERRY'S ROBOTICS PAGE =- -=ER-III=- -=ER-4PC=- -=CRS PLUS=- -=CRS A250=- -=PNEUMATICS=- |
||
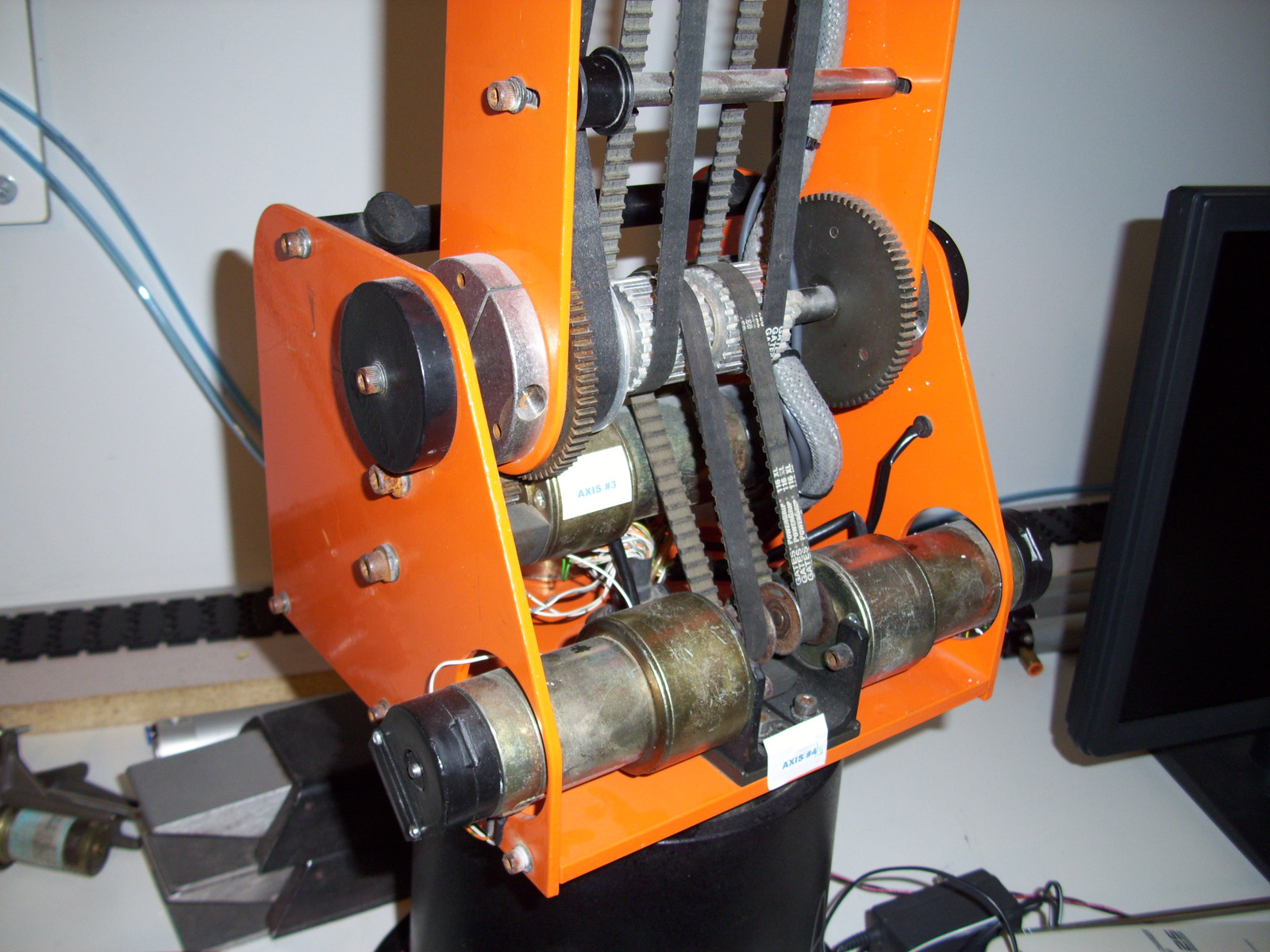
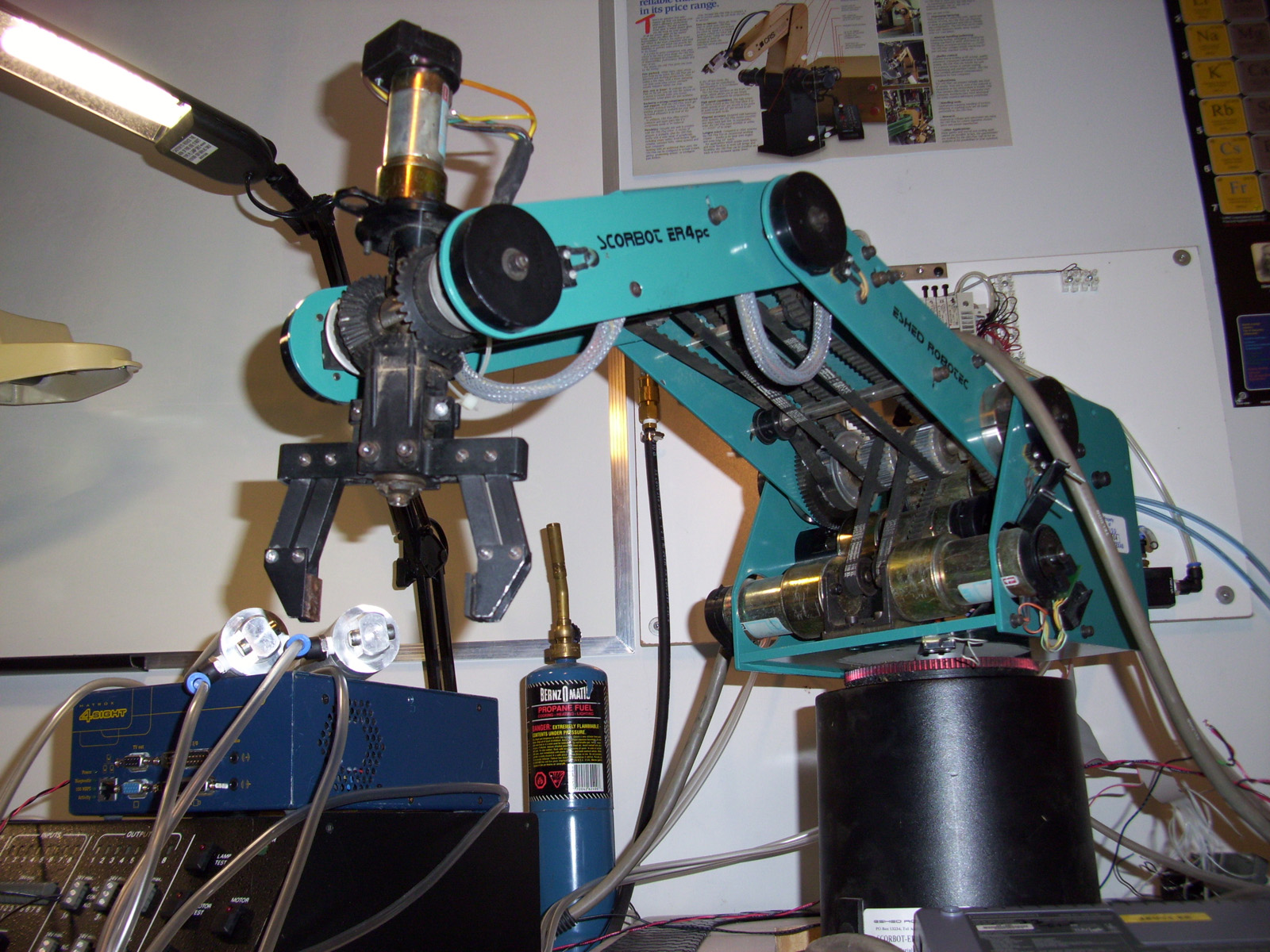
-= My Scorbot ER-III =- Shown below is my Scorbot ER-III robotic arm working cell. I've been using Scorbot educational robotic units for about 9 years now and it's such a blast. I built a table top conveyor unit using some industial FLEX-LINK conveyor chain. I have also interfaced a Pneumatics control board with a pressure regulator control valve and three seperate solenoid manifolds. These are used to control various pistons and other pneumatic devices. Interfacing the manifold control ports to external electronics, allows me to connect the pneumatics to separate robot controllers for syncronized control programs between two robotic systems.
There is also a Vaccum generator for suction cup end effectors for the robot grippers. Lot's of Fun!
-= ER-III Robot Controller =- The ER-III controller is shown below.
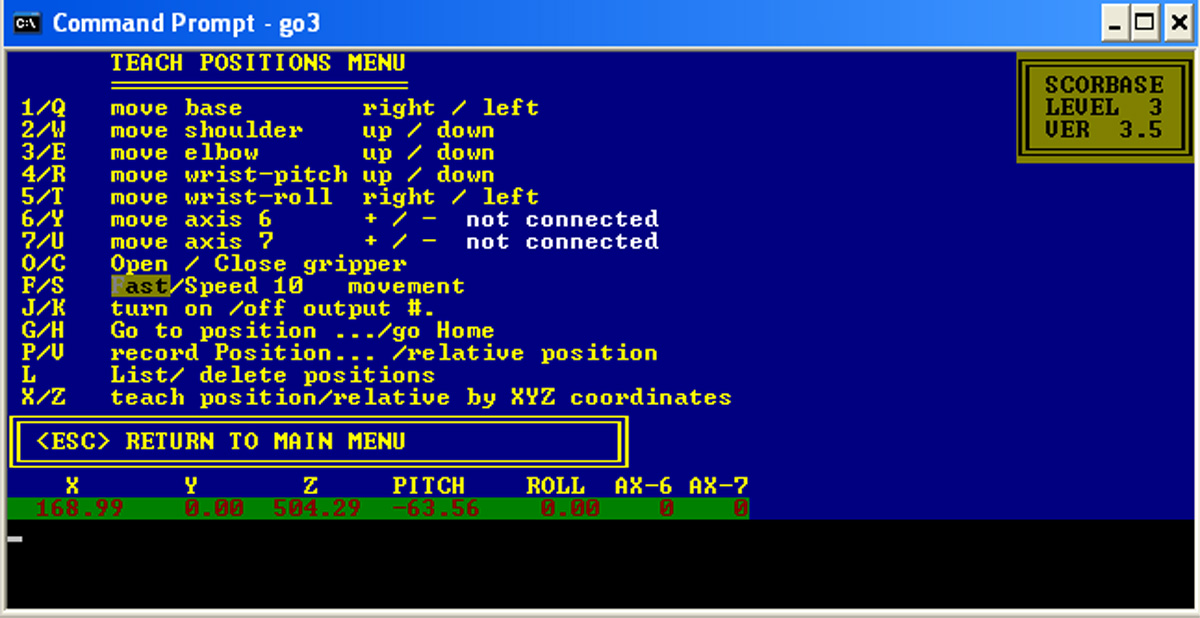
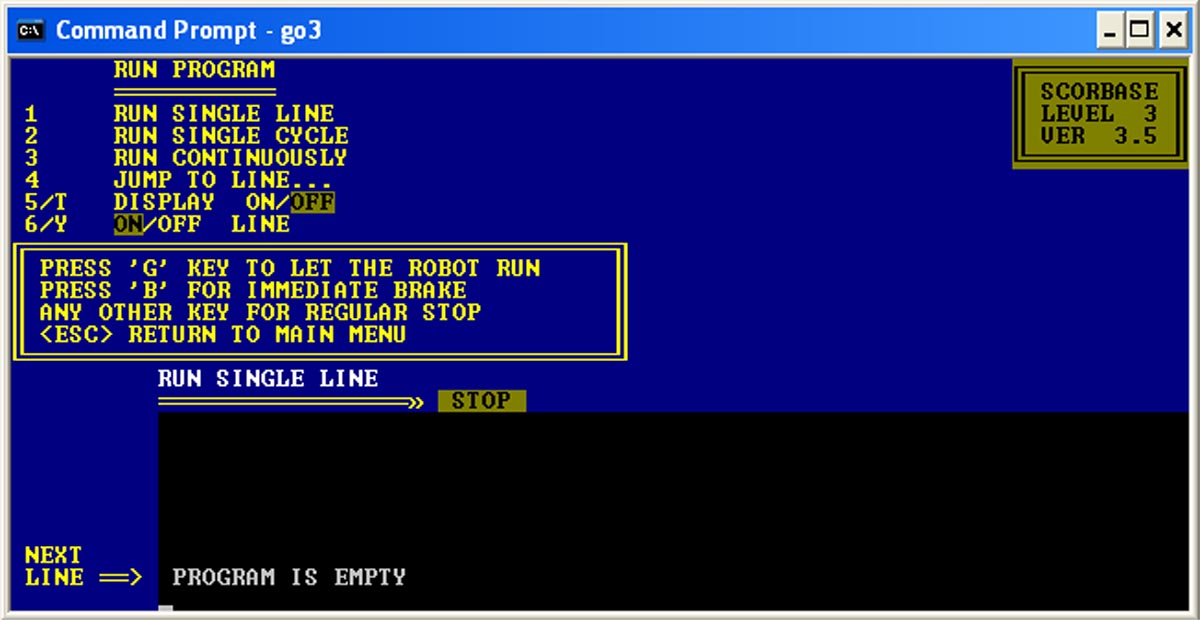
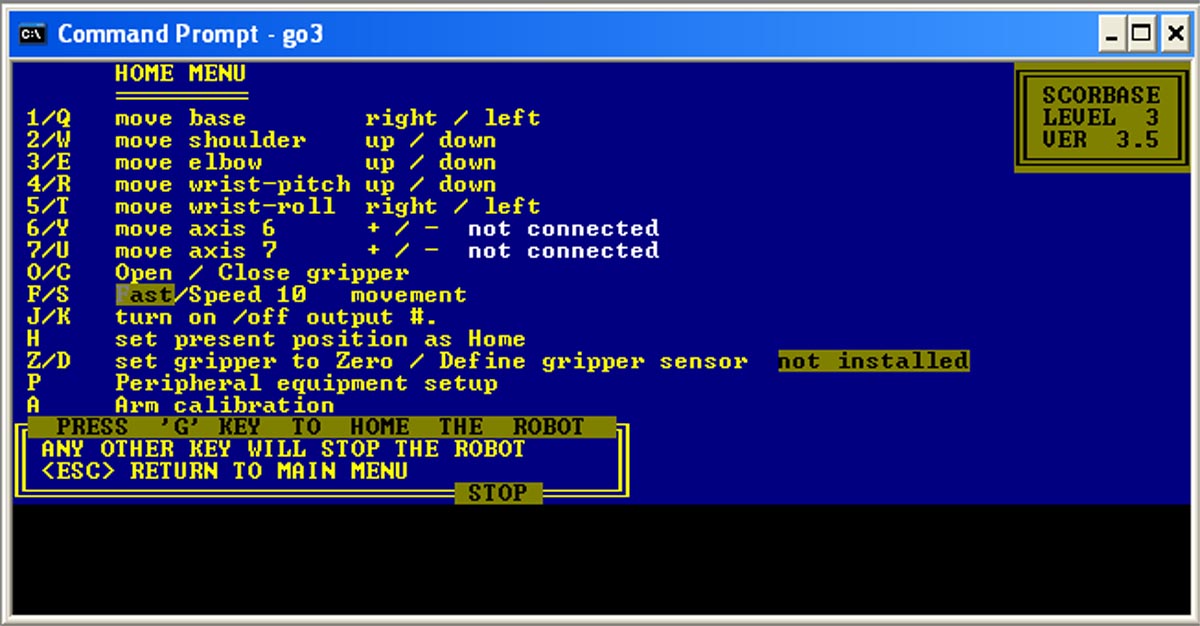
The software interface for this controller is called "SCORBASE" and is a DOS based control software. The interface from the PC to the Controller is an RS-232 serial connection.
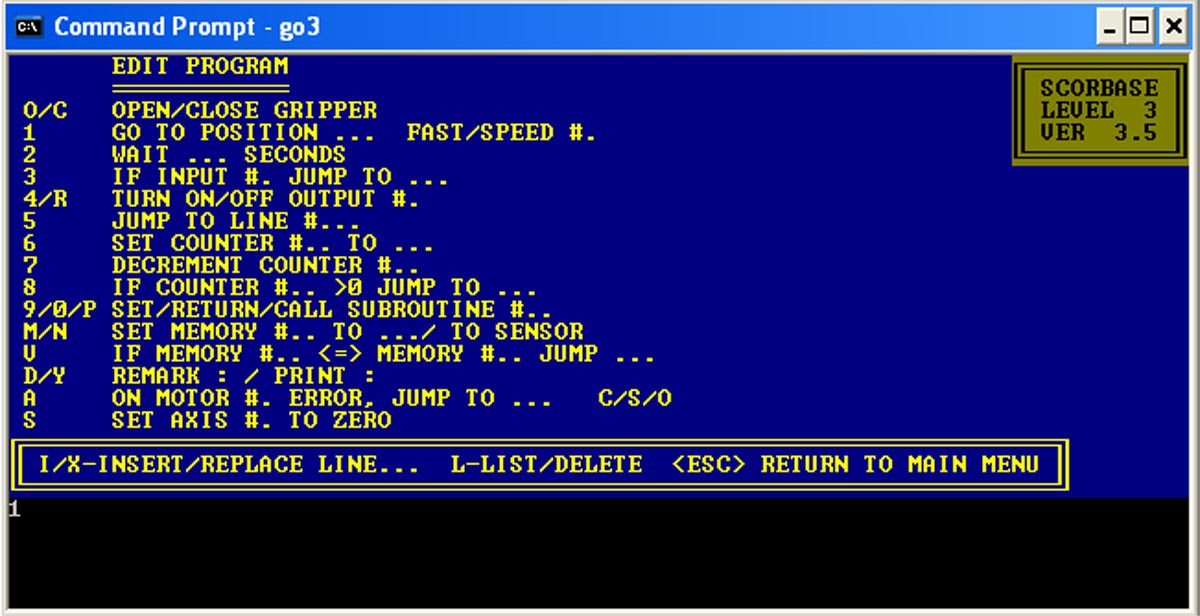
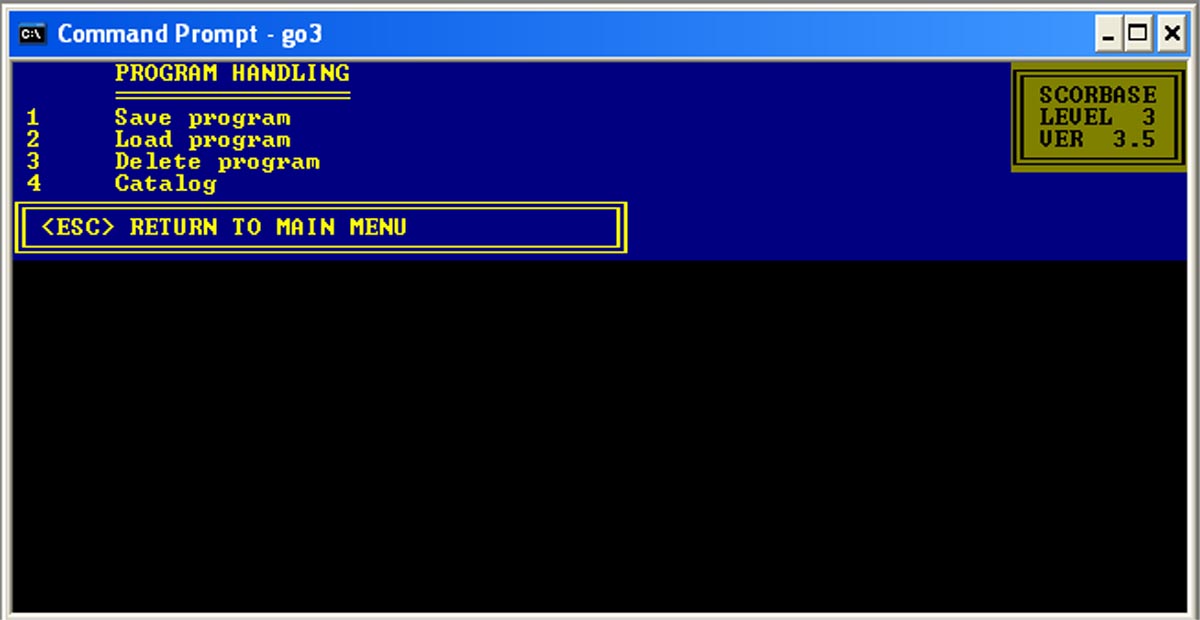
Shown below are a series of screen captures of the "SCORBASE" software GUI and its sub-menus.
If your looking for manuals and the old DOS software for scorbots, visit the link below: Join the Scorbot Yahoo Group Today!! http://tech.groups.yahoo.com/group/ScorbotUserGroup/
|
||
|
||








{kind=link}
{kind=link}